发布者:大恒图像 发布时间:2026-06-09 分享:
传感器
传感器是相机的核心部件,目前相机常用的感光芯片有CCD和CMOS两类。
1.CCD(电荷耦合器件)
目前常用CCD的有三种结构, 全帧转移、帧传输和行转移。
行转移(Interline Transfer)
在三种结构中,行转移是最常使用的一种,多数中、低端产品都使用这种方式。
全帧转移(Full frame )
全帧转移结构最简单,感光区和存储区在一起,可获得100%的fill factor。缺点是为避免图像漏光,在读出时要阻止外界光线进入。这可以通过使用机械快门、使用频闪灯的方法实现,或者使曝光时间远远大于读出时间,以尽量减少漏光。
帧传输(Frame transfer)
帧传输结构是感光区和存储区完全分开,且大小相等。曝光后的信号电荷以非常快的速度(通常小于帧周期的1%)转移到存储区,然后逐行输出。很明显,帧传输传感器可获得100%的fill factor,而且在读出过程中,可对下一帧曝光。缺点是芯片尺寸大,成本高。
2.CMOS(互补金属氧化物半导体)传感器
CMOS传感器和CCD传感器在感光部分原理是相同的,不同的是在每个像素单元中,除感光部分外,还有放大器和读出电路部分,整个CMOS传感器还集成了寻址电路、放大器和A/D。
3.CCD和CMOS的主要性能比较
满阱容量差异:由于CMOS传感器的每个像素包括一个感光二极管、放大器和读出电路,同时整个传感器还包括寻址电路和A/D,使得每个像素的感光区域远小于像素本身的表面积,因此在像素尺寸相同的情况下,CMOS传感器的满阱能力要低于CCD传感器。
成本差异:由于CMOS传感器采用一般半导体电路最常用的CMOS工艺,可以轻易地将周边电路(如AGC、CDS、时序、或DSP等)集成到传感器芯片中,因此可以节省外围芯片的成本。
CMOS 传感器可以随机寻址,能够非常方便地仅将队列中感兴趣地部分读出,提高帧率。
噪声差异:由于CMOS传感器的每个感光二极管都搭配一个放大器,而放大器属于模拟电路,很难让每个放大器所得到的结果保持一致,因此与只有一个放大器在水平寄存器输出端的CCD传感器相比,CMOS传感器的噪声就会增加很多,影响图像品质。
功耗差异:CMOS传感器的功耗低于CCD传感器。
线阵相机和面阵相机
上面介绍的都是面阵传感器,构成的相机称作面阵相机。感光单元(像素)按二维阵列排列,阵列中的每个感光单元对应一个像素,被拍摄的目标的一个面被成像,目标与相机之间可以是静止的,也可以是相对运动的。
还有一类传感器,感光单元排列是一维的,每次曝光仅是目标上的一条线被成像,形成一行图像,随着目标物体与相机之间的相对运动,相机连续曝光,最后形成一幅二维图像。这样的相机叫做线阵相机。当然为保证采集的图像不变形,目标相对与相机的运动应保持在一个方向。线阵相机每一行扫描的像素数可以从512-12000,每行的曝光也可以与目标的运动速度无关,因此也适用于目标运动速度变化的场合。
线阵相机适合于目标物体幅面大,或缺陷尺寸微小的场合,如:印刷质量检测,PCB板检测,布匹或棉花的检测,颗粒(粮食、水果等)检测等。
彩色相机
1.彩色面阵相机
构成彩色面阵相机的传感器有二种形式:
单片彩色相机:这种相机的传感器只有一片。传感器上每个像素点分别对应R、G、B三种颜色中的一种,R、G、B三种像元按一定的规律排列,我们实际所得到的每个像素点的R、G、B三原色的数值是根据该像素点及其周围若干点的像素值进行插值计算而来的,彩色图像效果与采用的差值算法密切相关,在颜色变化剧烈的边缘位置会有较明显的色彩失真和细节的丢失。目前我们常见的彩色相机一般是这种形式的,其价格和同档次的黑白相机相近。
3CCD彩色面阵相机:这种相机每个像素点对应有R、G、B三个感光元件,采用分光棱镜将入射光线分别折射到三个CCD靶面上,分别进行光电转换得到R、G、B三色的数值。这种相机得到的图像质量好,没有细节丢失的问题,但由于相机结构复杂,所以一般较昂贵。另外由于这种相机采用了分光棱镜的方式,光线到达每个CCD靶面的光程是不一样的,所以需要镜头做针对性的设计才能达到比较好的图像效果,所以使用3CCD的相机还需要配备专用的镜头。
2.彩色线阵相机
同样,构成彩色线阵相机的传感器也有二种形式。
3Line彩色相机:传感器的具有R、G、B三行像元,分别对红、绿、兰三种波长的光敏感应,所以每个像素点都会对应R、G、B三个通道的数值,形成彩色的图像数据。需要注意的是,由于R、G、B三行像元在同一时刻所采集的并非同一位置的信息(见图),在实际应用中需要进行空间校正才能得到所需的彩色图像。一般的相机都提供内部进行空间校正处理的功能,要取得质量良好的图像,这类相机对自身安装精度和目标运动的稳定性都有一定的要求。
3CCD彩色线阵相机:与面阵的3CCD相机原理相同,采用分光棱镜将入射光线分别折射到三个CCD靶面上,分别进行光电转换得到R、G、B三色的数值。图像质量好,但需配备专用镜头。
传感器分辨率和尺寸
传感器尺寸通常以有效面积(宽度×高度)或对角线尺寸(英寸)表示;分辨率通常以水平方向和垂直方向的像素数或套用计算机显示使用的方法表示。
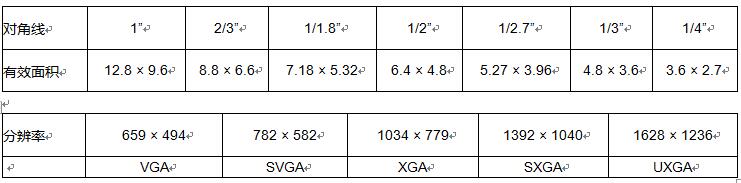
对角线 1” 2/3” 1/1.8” 1/2” 1/2.7” 1/3” 1/4”
有效面积 12.8 × 9.6 8.8 × 6.6 7.18 × 5.32 6.4 × 4.8 5.27 × 3.96 4.8 × 3.6 3.6 × 2.7
分辨率 659 × 494 782 × 582 1034 × 779 1392 × 1040 1628 × 1236
VGA SVGA XGA SXGA UXGA
在实际应用中,相机、检测系统的分辨率与传感器的分辨率不同。相机的分辨率除传感器的分辨率因素外,还取决于镜头、传感器的像素尺寸和模拟电路。分辨率通常以每毫米多少线对表示(lp/mm)。如果传感器像素尺寸为ρ,理论上最大空间分辨率为1/(2ρ)lp/mm。而检测系统的分辨率还与光源及其它一些因素有关。
在使用中,要注意传感器尺寸和镜头尺寸相配合。
像素尺寸
像素尺寸就是每个像素的面积。
很显然,单个像素面积小,单位面积内的像素数量多,相机的分辨率增加,利于对细小缺陷的检测和增大检测视场。但随着像素面积的缩小,满阱能力(每个像素能够储存的电荷数量)也随之减小,造成相机动态范围的降低。因此,在分辨率允许的情况下,选择像素尺寸大的相机,会有较大的动态范围;增大的像素尺寸,同时还会提高相机的感光度(感光度是指多暗的情况下,相机能够工作)。当然,在更多电荷被积累和存储的同时,伴随其产生的各类噪声也会加大。
扫描方式
扫描方式是指CCD或CMOS中像素的输出方式。
隔行扫描是将一幅图像分成二场,奇数行组成一场,偶数行组成一场,二场按规定先后顺序输出。大多数CCTV相机采用隔行扫描的方式。
逐行扫描是将一幅图像的所有行,从第一行到最后一行按顺序逐行输出。机器视觉中使用的相机多采用逐行扫描。
在拍摄高速运动物体的场合,要选用逐行扫描相机或使用隔行扫描相机的场采集方式采集图像。
像素时钟、最大行频和最大帧率
像素时钟:像素时钟是CCD中像素输出的节拍。在给定传感器分辨率的条件下,像素时钟越高,最大的行频或帧率越高。当然在增加像素时钟的同时,传感器的读出噪声也会增大,影响相机在低照度环境下的性能。对于高速、大数据量输出的CCD传感器,传感器阵列构造多个输出端口(Tap),每个端口输出全部像素的一部分,从而降低像素时钟,减少读出噪声。
最大行频:指线阵相机每秒钟能够输出的最大行数。
最大帧率:指面阵相机每秒钟能够采集并输出的最大帧数。限制最大帧率的因素有:曝光时间、数据读出时间(图像数据从传感器传送到相机内部FIFO或存储器的时间)、数据传输时间(图像数据从相机内部FIFO或存储器到PC的时间)、像素深度和信号输出格式。
手册上通常列出的是在最大分辨率下的帧率。如果采用部分扫描或binning技术,会提高相机的输出帧率。当然,前者缩小了采集视场,后者降低了分辨率。
像素深度
像素深度是指每个像素用多少比特位表示。一般来说,每个像素的比特位数多,表达图像细节的能力强。
信噪比和动态范围
信噪比:是指测量到的信号与测量到的总噪声之比。
动态范围:用来描述每个像素能够分辨出的灰度等级。它是饱和电压(最大的输出电平)相 机输出的噪声之比。宽动态范围能够使场景中非常亮和非常昏暗部分的细节同时被清晰的显示,如人背向站在非常亮的光线下,背景的细节和人脸上的细节都能够看的非常清晰。
感光度、光谱曲线
相机的感光度(响应度)定义相机在固定曝光量下的灵敏性特性,它与照射的光波的波长有关。 感光度的单位是DN/(nJ/cm2),表示在已知曝光1nJ/cm2条件下,相机输出的像素灰度值。必须要注意的是测量时对增益的设置说明。相机在高增益下可以得到高的响应度,但噪声同时增加会减少动态范围。
许多相机厂商并不给出不同波长下的传感器或相机的输出值,而仅给出相对值,反映不同波长下的灵敏特性。
每个像素收集的光电子数量与入射光强度、曝光时间成线性关系,与光波长呈非线性关系。
图像采集方式
图像采集方式主要是指:
(1) 什么时候开始采集?
(2) 曝光的长度?
(3) 如何结束采集?
开始采集通常有软件采集和外部硬件信号触发采集二种。软件采集是计算机向相机发出开始采集命令,可以是单帧采集或多帧连续采集;外触发采集是通过外部触发信号启动采集,信号可以是上升沿或下降沿触发或电平触发。
曝光时间,软件命令采集是通过对寄存器编程设置实现不同长度的曝光;外触发采集的沿触发方式也是通过寄存器编程设置实现,电平触发则是用触发的电平的持续时间控制的。
采集结束控制主要针对软件采集,单帧采集结束后自动清除采集命令,连续采集要由计算机发出命令清除设置的采集命令。
曝光(快门)
快门就是控制曝光时间。传统的照相机是通过机械快门对照射在底片上的光进行遮光动作实现曝光控制。在CCD或CMOS相机中是利用电子快门实现曝光控制。照射在传感器上的光不断发生光电转换,电子快门的原理是只储存一定曝光时间的信号电荷,然后进行输出。
常用的电子快门有二种工作方式: global shutter(帧曝光),rolling shutter(逐行曝光)。Global shutter 是传感器阵列中所有像素同时曝光,曝光周期由预先设定的快门时间确定。一些CMOS传感器使用rolling shutter,传感器上的所有像素不是同时曝光,而是同一行上的像素同时曝光,不同行的曝光起始时间是不同的。图像上的第一行最先曝光,最先结束,后面的行开始和结束曝光均比前一行略有延迟,相互有交迭,每一行的曝光时间是相同的,行间的延迟是不变的。
由于在Rolling shutter方式下,整个图像曝光需要一定的时间,对于高速运动的物体,会造成图像模糊、变形。
数据输出方式
数字相机常用的输出方式有USB、1394a、1394b、Camera Link和GigE。
Binning
Binning是感光后的像素在传感器中进行合并后再输出。像素的合并可以是行之间,也可以是列之间,因此有垂直binning和水平binning。垂直binning是把相邻的两行移到水平移位寄存器中,然后一同移位输出;水平binning是把水平移位寄存器中的相邻像素移到放大器中,在相邻像素间不复位。
显而易见,相邻像素binning,信号电荷增加一倍,相机对光的灵敏度增加6dB,信噪比提高3dB。当然,binning后的图像空间分辨率降低了。
Blooming
Blooming是指被拍摄的场景中有非常亮的部分,在光电转换过程中,传感器上对应非常亮的部分的像素电荷超出了满阱能力,溢出到周围相邻像素,画面上产生白斑。
Smear(漏光)
Smear现象是指当拍摄对像中含有高亮度的光线或太阳光时,高亮度部分上下方可看见很亮的垂直白线或白带。不同的CCD结构,产生smear的机理也有所不同。
如何选择合适的数字相机
在实际应用中,选择相机类型不仅要从技术上考虑,同时要兼顾成本的因素。为简化问题,这里仅从技术上介绍相机选型的基本原则。
1) 根据检测项目的需求和待检目标的特点确定选用面阵相机还是线阵相机;
2) 确定选用彩色相机还是单色相机。在一些颜色分类的场合,选用单色相机配合不同光谱的光源或滤色片,也会使处理简化;
3) 定义待检目标的最小特征和检测视场,由此确定相机的分辨率;
4) 根据目标运动速度和通过率,确定相机的帧率(行频);
5) 根据处理需求,选择相机的智能特性,如: 平场校正,LUT, binning等;
地址:北京市海淀区苏州街3号大恒科技大厦北座12层
邮箱:sales@daheng-imaging.com